

Twitterで↓の動画を見て、
「おお、サッカーボールパターンか、ヒンジで角度を変えられるようにすれば面倒な面同士の角度計算しなくても簡単に作れるかも?」
って思って始めてみたんですが、そうは問屋が卸しませんでしたw
とりあえず6角形、5角形のパーツを作成。
ヒンジの回転中心部の長さが6角形、5角形共に同じになるようにスケッチを描いて立体化。

ヒンジ中心線から一番外側のオフセットが5.5mmになっているのは、↓の様にヒンジ貼り付け面の位置合わせを楽にするために0.5mm盛り上げているためです。



次にヒンジ。


で、組み立てを始めた訳ですが・・・上手くいきませんw

ジョイントを使って張り付ければ簡単だべ、とか思ってたんですが可動軸が多すぎるためか出来ません(泣
↓現実なら、少し頭がテーパーになったピンを叩き込めば勝手に角度が出るんですけどね。

とりあえず、見た目でヒンジと6角形、5角形の隙間がなるべく少なるなるように調整して組み上げてみましたが

場所によっては↓の様に隙間が空いてしまったり、重なっていたりしています・・・

ま、これでいっか、と一旦は諦めたのですが何かモヤモヤする・・・という事で角度についてネットで情報を集め出しました。
このサッカーボールパターンは切頂二十面体って言うんですね。

正二十面体の頂点をカットした物なので、6角形同士の面の角度は正二十面体と同じという事で検索、↓のページから41.8103度という情報を得ました。

で、ヒンジのジョイントで角度指定すればいいんですが、何か面白味に欠けるので治具を作る事にしました。

スケッチ上では138.2度と表示されていますが、入力値は138.19度(180-41.81)です。
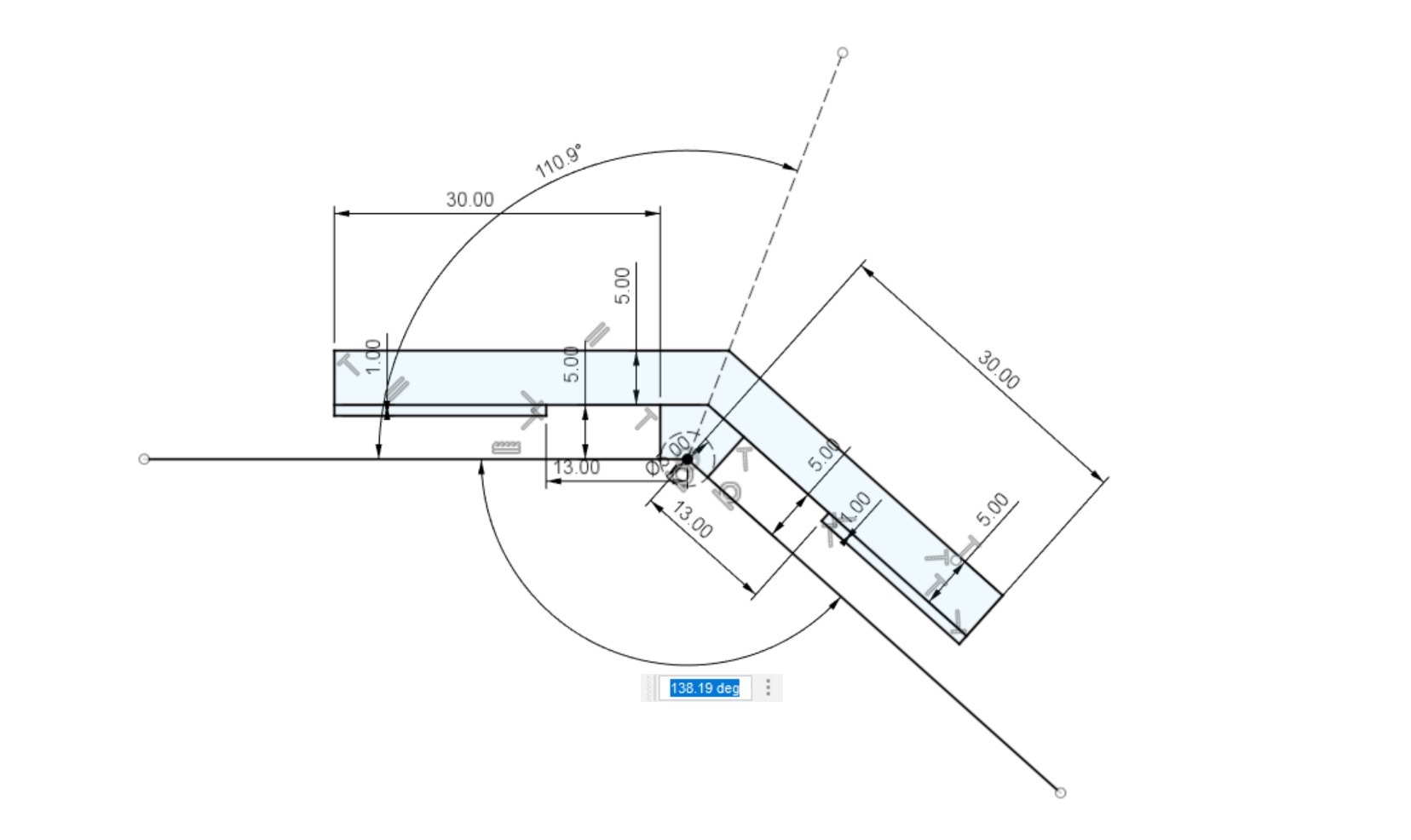


↓ついでに角度ズレが分かりやすいようにサーフェイスで指標を追加。

で、再度組み立て。
6角形のパーツを1枚配置し、次に治具を配置して位置合わせ、ヒンジも配置して位置合わせ後に位置固定ジョイントで張り付け、その後2枚目の6角形を配置して位置合わせで治具に張り付け、ジョイントも角度を位置合わせで修正して位置固定ジョイントでヒンジに張り付け。

そして2枚目とヒンジを円形状パターンで1枚目の垂直軸を指定して周りにばら撒きます。

これを繰り返して6角形を全て配置します。

そしてズレを確認、一番誤差が大きくなりそうな最初に配置した6角形の対面にある部分ですが、この位の拡大率なら全く分かりません。

ただし拡大倍率を上げていくと少しだけ隙間があります・・・まあ、しょうがないですね。

5角形は、まず一ヵ所をヒンジに張り付けて、

指標で角度合わせ、実際はもっと拡大して一致させています(ここはアナログ・・・(汗))

最後にヒンジが付いていない箇所をやはり円柱状パターンでバラ撒き、6角形、5角形の原点表示と指標のサーフェイスの表示をOFFにして完成です。
3Dプリンタで出力したらちゃんと組みあがりますかねぇ?
まあ、それならサイズをもっと小さくしないとちょっと大きすぎますね、直径約40cm (^^;





コメントを投稿するにはログインしてください。